 Decentralized Multi-Robot Information Gathering from Unknown Spatial Fields
Decentralized Multi-Robot Information Gathering from Unknown Spatial Fields
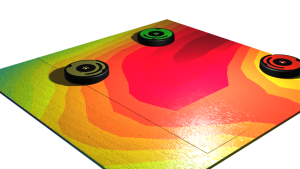
This Project is to efficiently explore and gather information from unknown spatial fields using decentralized mobile robots presents a significant challenge. Existing approaches that are limited to discrete domains and synchronous planning often struggle to scale well as the problem size increases. To address this, our motivation is to develop an incremental scalable motion planning algorithm that operates in continuous domains and employs an asynchronous communication strategy. The goal is to guide a team of cooperative robots to visit the most informative locations within a limited mission duration, where the informativeness is specified by a density function. In this project, we make four contributions:
- Propose an Asynchronous Information Gathering with Bayesian Optimization (AsyncIGBO) algorithm to choose the next informative samples for robots subject to their observed knowledge
- Estimate the unknown density function from gathered samples with independently exploring multiple robots
- Generate a distributed control law in continuous domains while considering realistic robotic resource and motion constraints
- Theoretically analyze the asymptotic no-regret properties of our algorithm with respect to a known spatial field
For More details click here.
 Interdisciplinary Initiative for Autonomous Systems in Environmental Research
Interdisciplinary Initiative for Autonomous Systems in Environmental Research
This project aims at developing algorithms to effectively and efficiently collect water data using autonomous underwater and surface robots, and then analyze and develop visualization tools for the data collected in Biscayne Bay, FL. To visualize datasets and know more about our missions, click here.
 Privacy-Preserving Multi-Robot Task Allocation via Secure Multi-Party Computation
Privacy-Preserving Multi-Robot Task Allocation via Secure Multi-Party Computation
The concept of multi-robot task allocation holds immense potential for identifying synergies between robots and optimizing their collective performance. While it is straightforward to achieve cooperation within a single organization, challenges arise when robots are competitors in a marketplace, safeguarding proprietary data and copyrights. However, limited cooperation among rivals, especially in the form of resource sharing and infrastructure utilization, can significantly reduce costs for all parties involved. Recognizing that competition and cooperation are not mutually exclusive, we address the crucial question of how to optimally allocate robots to tasks while upholding data privacy and confidentiality. Our approach tackles this question by:
- Implementing an auction-based assignment algorithm through secure multi-party computation operations, eliminating the need for a trusted auctioneer.
- By ensuring that no task valuations, utilities, positions, or related data are released, we provide precise and robust privacy guarantees that surpass existing methods.
- This innovative approach empowers multi-robot systems to collaborate effectively without compromising sensitive information, fostering a secure environment for cooperation in competitive landscapes.
For More details click here.
 Coordinated multi-robot planning while preserving individual privacy
Coordinated multi-robot planning while preserving individual privacy
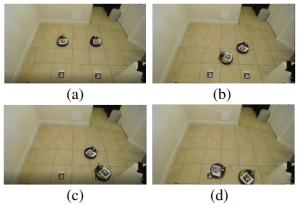
Multiple robots operating concurrently often can achieve their ends more efficiently by cooperating to mediate their use of shared resources. But, as the information that the robots possess is sensitive or restricted, this poses the question of how to preserve individual privacy whilst coordinating. To show the practical feasibility of Secure Multi-Party Computation in Robotics and Autonomous Systems, we examine several particular scenarios where we envision it being relevant to the context of coordination among robots, and propose three secure path intersection protocols:
- A secure path intersection protocol based on the polygon intersection ideas presented in and simplified to make its implementation feasible using open source software packages.
- A protocol that ensures that two robots will not collide while executing their task, its software implementation, and hardware proof of concept experiments.
- A new, secure 3D path collision protocol that can be used in plans involving time or 3D workspaces.
For more details, click here.
 Scheduling and Path-Planning for Operator Oversight of Multiple Robots
Scheduling and Path-Planning for Operator Oversight of Multiple Robots
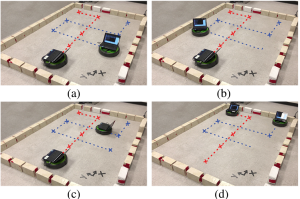
There is a need for semi-autonomous systems capable of performing both automated tasks and supervised maneuvers. When dealing with multiple robots or robots with high complexity (such as humanoids), we face the issue of effectively coordinating multiple operators across robots. We build on our previous work to present a methodology for designing trajectories and policies for robots such that few operators can supervise multiple robots. Specifically, we:
- 1) Analyze of the complexity of the problem
- 2) Provide a methodology for designing policies so that operators can oversee many robots
- 3) Present a method for designing policies and robot trajectories to permit operators to oversee multiple robots
- 4) Include simulation and hardware experiments demonstrating our methodologies.
For more details, click here.